Bio-Inspired Locomotion
Why build robots that move like animals?
Many mobile robots use the energy stored in batteries to move and we want the batteries to last a long time. Animals need energy too! They get their energy by eating food, like fruits and vegetables. Each animals is unique in how it moves, but animals move in a way that allows their "batteries" to last a long time. We say that their movements are energy efficient. Humans, for example, are great walkers.
How do we build robots that mimic animals?
Everything starts with an observation of how an animal moves. An important observation is that animals tend to repeat the same pattern as they move. A locomotion pattern is known as a gait. We then try to copy the patter using a model that captures the basic physics of the movement. IN the case of a gibbon, our model is based on a double pendulum.
The Gibbot initially started off as a class project when it was known as the Monkeybot. The video below shows the first attempts at getting the robot to swing.
2010: A new look
Kinea Design, llc. redesigned the robot giving it a rugged and stylish black and purple exterior.

With an improved design, both internally and externally, the Gibbot can now quickly swing
across the steel wall
The Gibbot has been at the 2012 and 2014 Museum of Science and Industry's National Robotics Week. In 2012, it was a part of the NxR lab's live demos at the museum. In 2014, it was part of the student presentations given at the museum. The title of the talk was "How I Met My Robot (or: how an open-ended research topic turns into a specific robot)."
In 2012, the IEEE Spectrum Magazine wrote an online article about the robot: "Gibbot Training to Swing Like Monkey." The news also made appearances in Popular Science, Slate, and other online news blogs.
Read the IEEE article here .
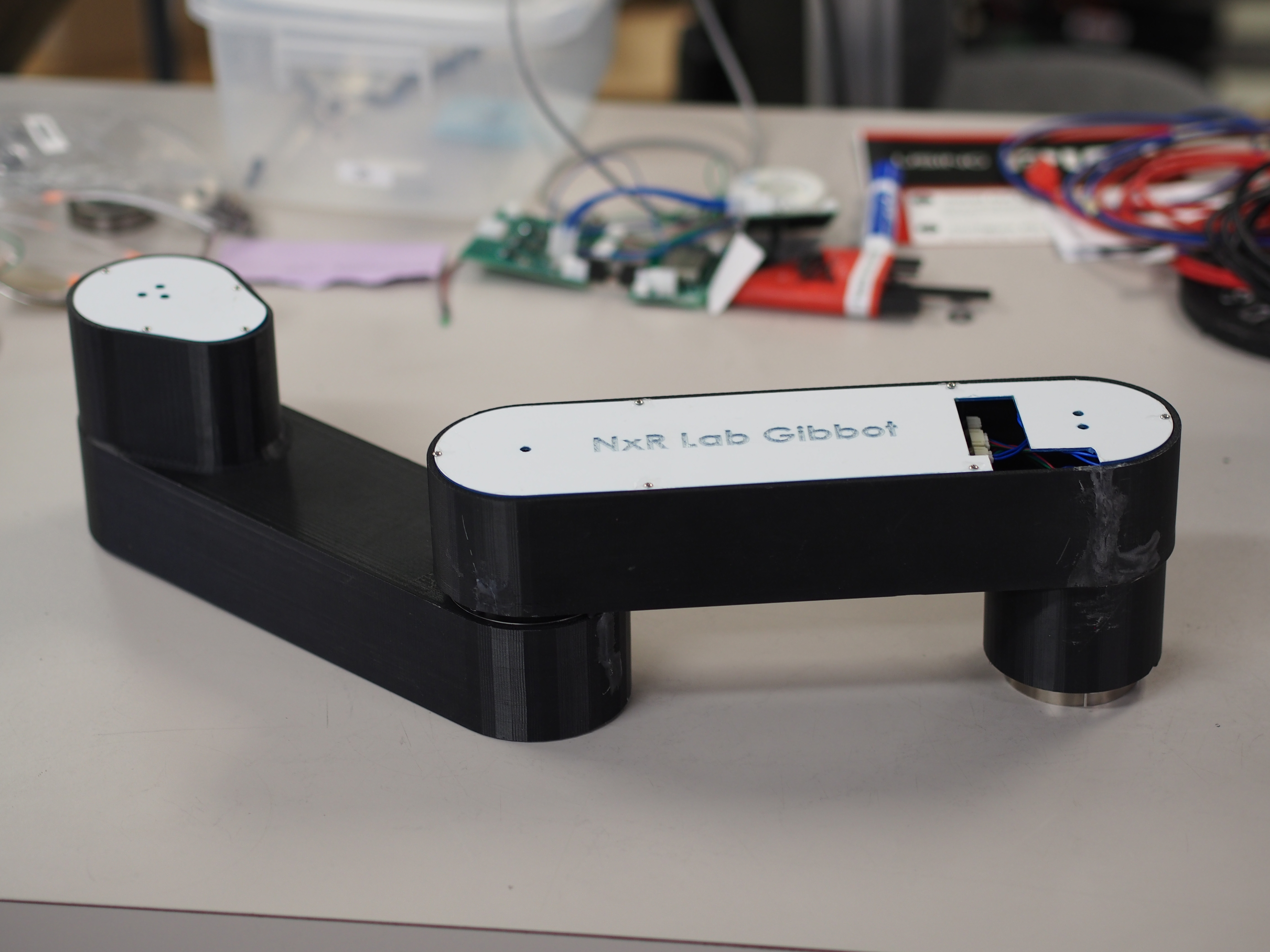
ARMS:
The Gibbot has two arms that are connected with a pin at one end. They are allowed to swing freely,
allowing the Gibbot to move.
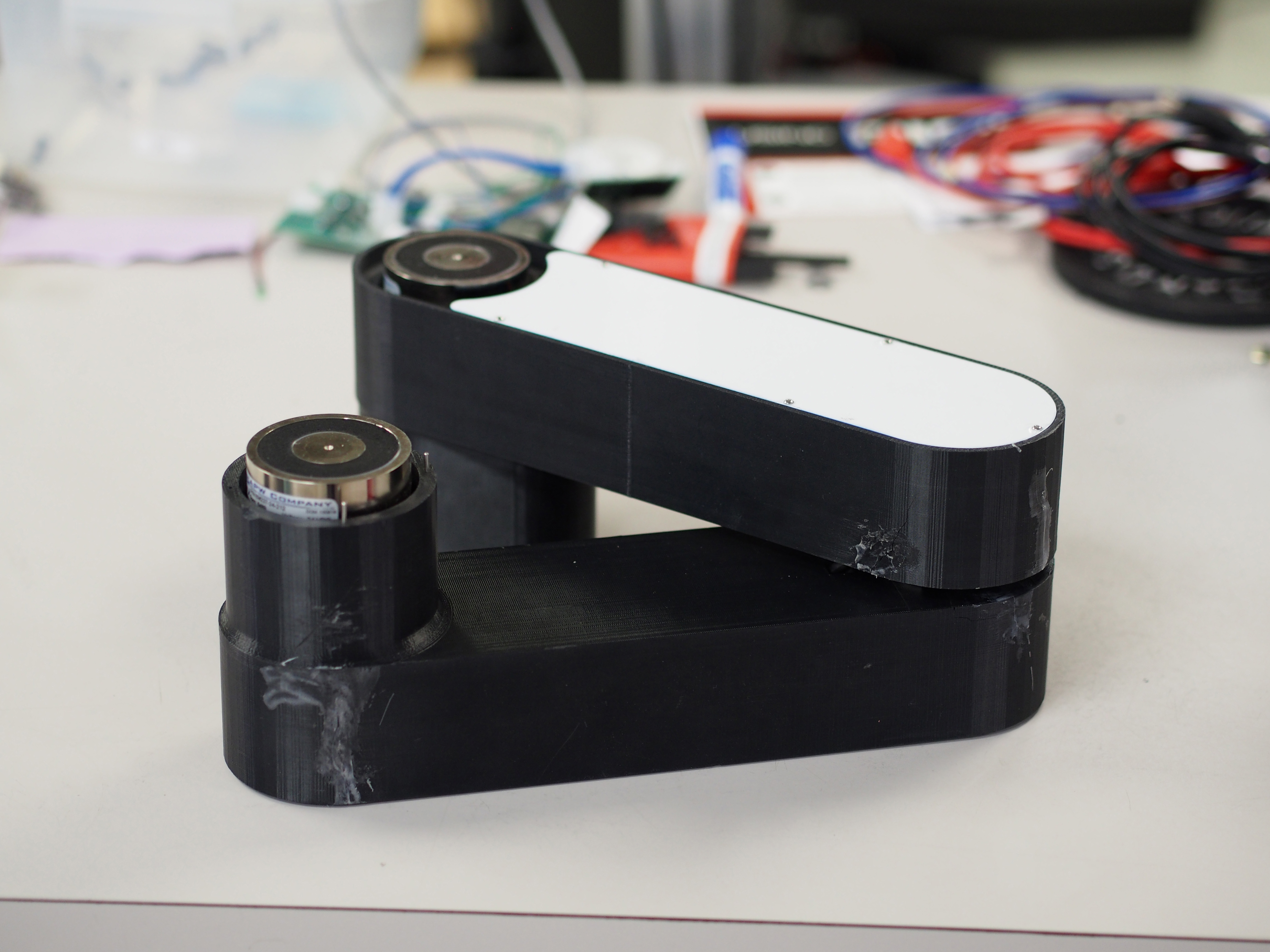
MAGNETS:
On each arm are two electromagnets, (magnets that you can turn on and off).
By switching the magnets on/off, we are able to control when the robot lets go of and grabs
onto the wall. By perfecting the timing of this, the Gibbot is able to move smoothly.
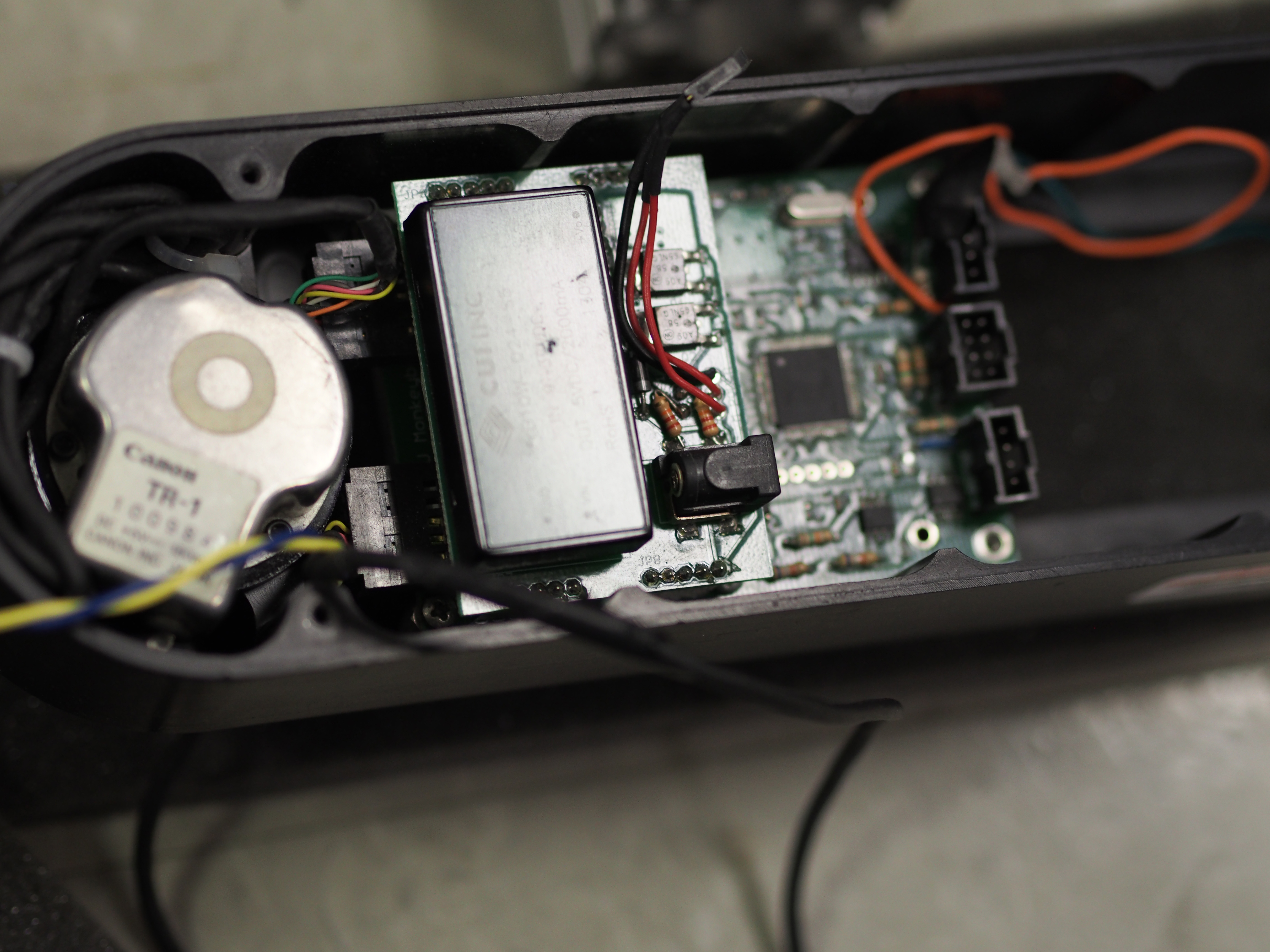
GUTS:
Inside the Gibbot, the circuit board contains the code which gives instructions
to the robot and communicates with the computer. This allows the user and robot to "talk" to
each other and send information back and forth.
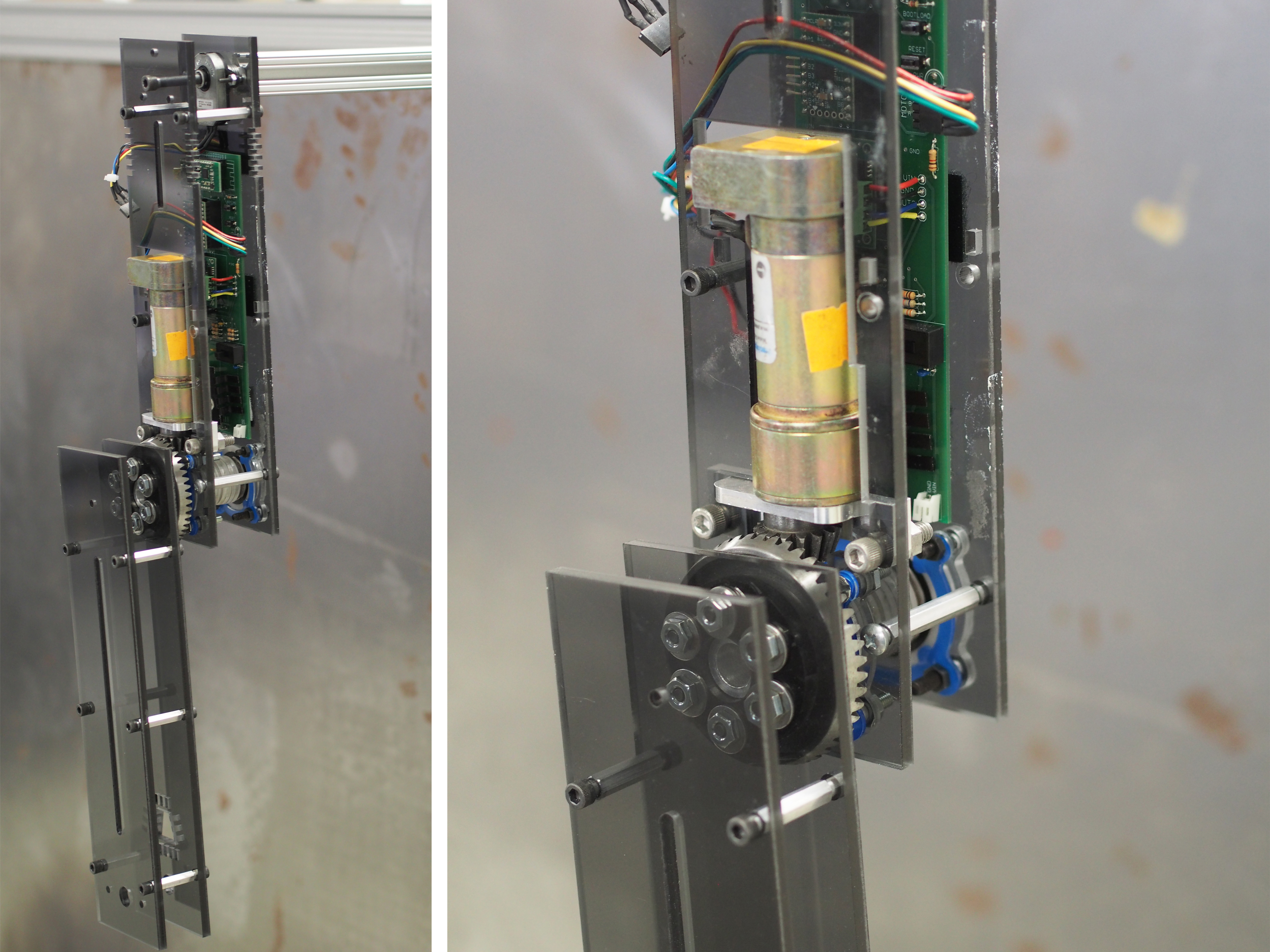
SKELETON:
This is what the core of the Gibbot looked like before it was packaged up inside
its frame. It is a prototype used to test the controls of the Gibbot.
The Physics
Potential Energy
Energy is measured in the amount of "work" it does. Potential Energy is stored energy. Right before the Gibbot starts a swing, it has a lot of potential energy. As it swings, it uses up its potential energy and converts it into movement. The animation below shows that while the total energy stays constant, its form changes. Notice how potenial energy is greatest when the white arm is highest above the ground. Kinetic energy is greatest when the arm is at the bottom of the swing because this is where its speed is the greatest.
Momentum
Momentum describes how strong a moving thing is. Things that aren't moving have no momentum. Moving things have less momentum if they are light or moving slowly, and more momentum if they are heavy or moving fast. The Gibbot uses its momentum to propel itself across the board. This allows it to move with more efficiently. In the animation below, the car and truck have the same speed after the collision, but because the truck is bigger, it has more momentum being it would be harder to stop.
Who

Nelson, Creig, Jeanntte, Bridgette etc.