The Arms
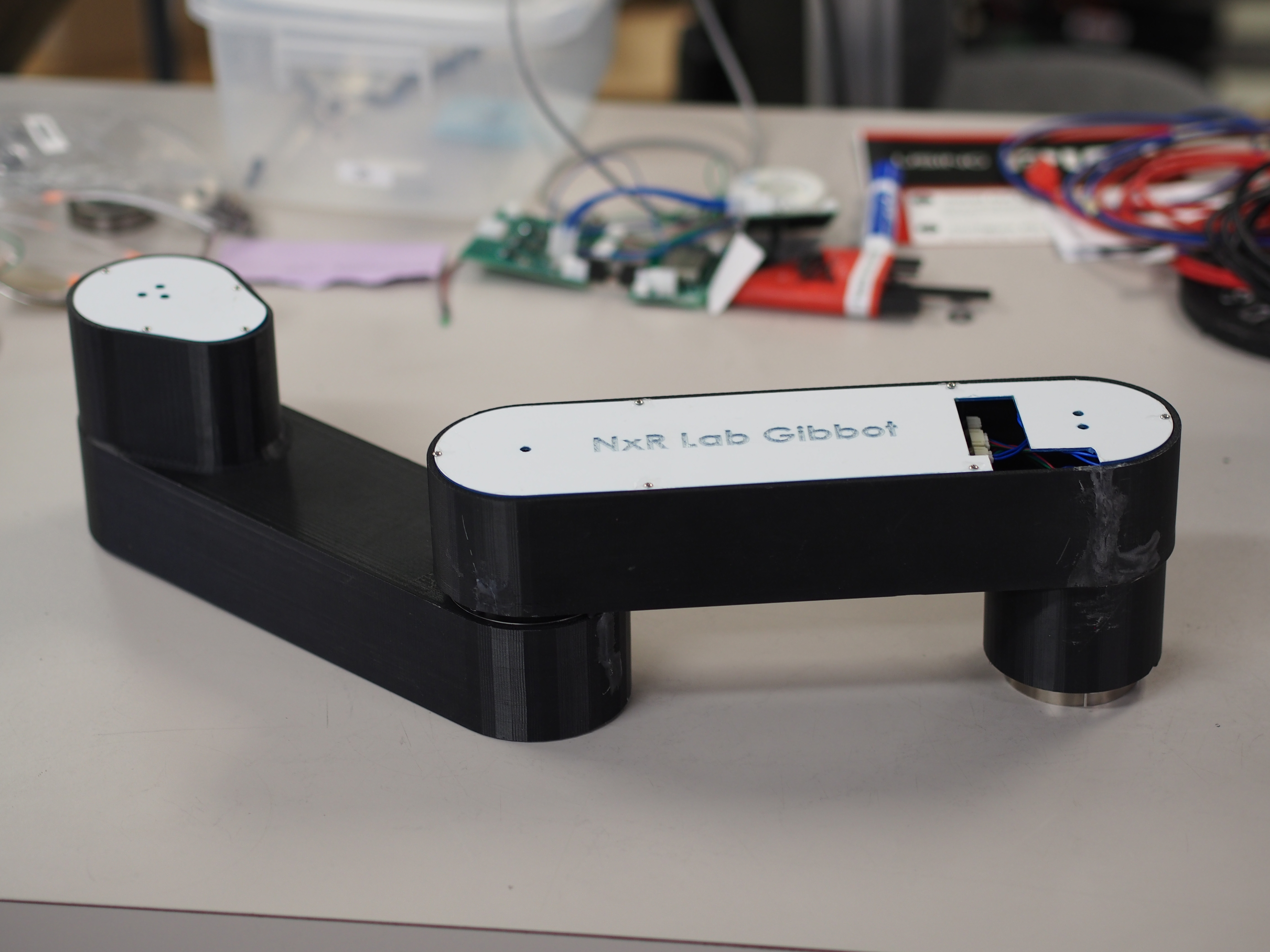
The Gibbot has two arms that are connected at one end. They are allowed to swing freely,
allowing the Gibbot to move.
The Magnets
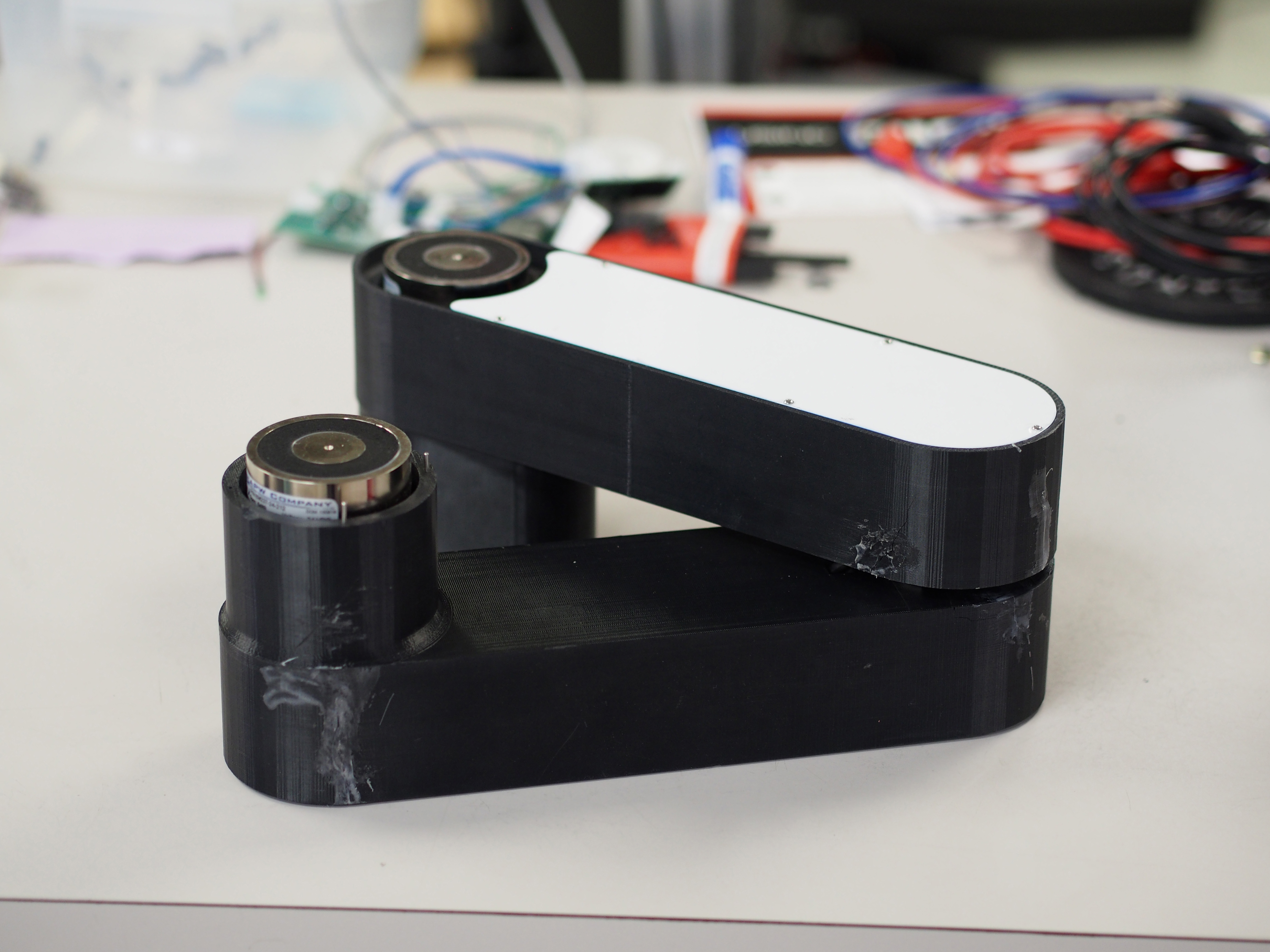
On each arm are two electromagnets, (magnets that you can turn on and off).
By switching the magnets on/off, we are able to control when the robot lets go of and grabs
onto the wall. By perfecting the timing of this, the Gibbot is able to move smoothly.
The Guts
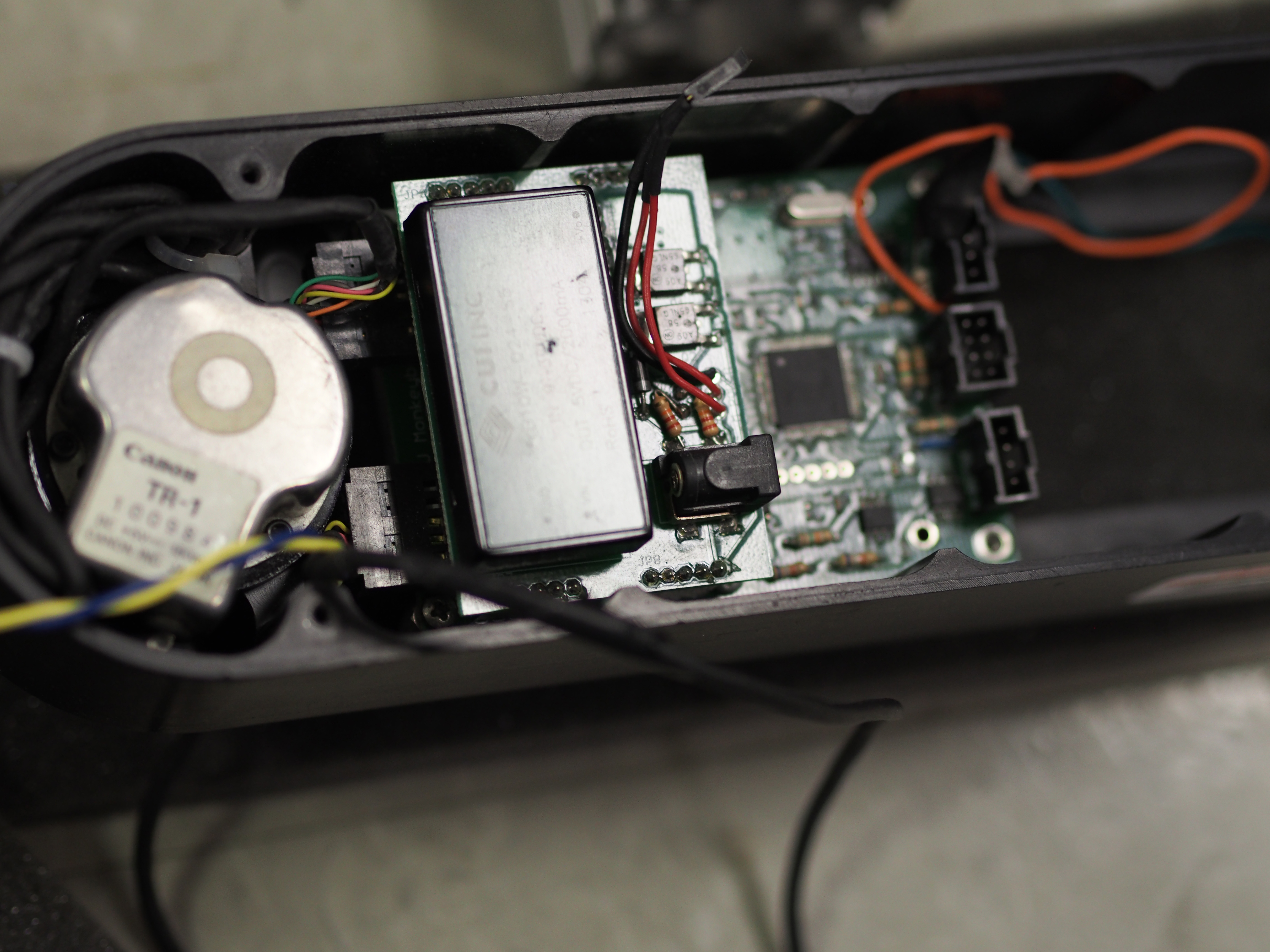
Inside the Gibbot, the circuit board contains the code which gives instructions
to the robot and communicates with the computer. This allows the user and robot to "talk" to
each other and send information back and forth.
The Skeleton
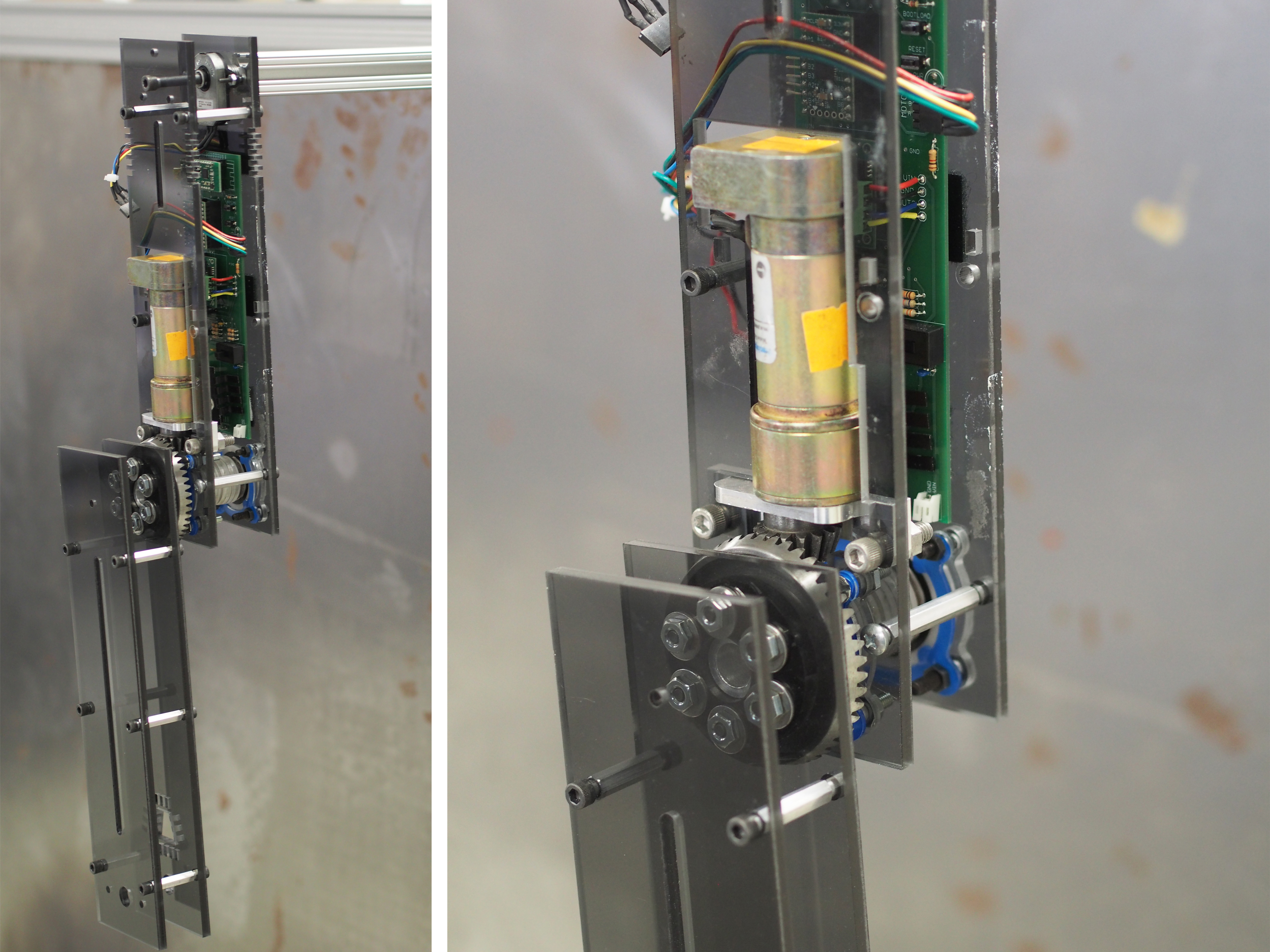
This is what the core of the Gibbot looked like before it was packaged up inside
its frame. It is a prototype used to test the controls of the Gibbot.